
What are Pneumatic Grippers?
Pneumatic Grippers are found in automated manufacturing and assembly systems where they act as fingers to "grip" and "pick" products for repositioning or moving.
Pneumatic Grippers come in many sizes, styles, and functions, each designed to handle different types of parts that range in shape, size, and material. The opening and closing force from gripper jaws is created via pneumatic pressure on an internal piston. As the piston is actuated, it drives a wedge, a cam, a rack and pinon, or pivot pins which translate linear motion into angular or parallel jaw motion.
How do I select the right pneumatic gripper?
Due to the vast array of available pneumatic gripper styles and options it can be difficult to select and size the appropriate product for an application. Some information needed to specify the right pneumatic gripper for your application:
-
• Total Stroke Required
• Total Payload
• Acceleration of Gripper in Z, X/Y Axis
• Required length of gripping fingers
• Gripping Direction
• Safety Spring for Backup
• Surface material of object being gripped
• Surface material of gripper finger
• Environmental Concerns (Dust, Heat, Water, Chemicals)
• Desired Safety Margin
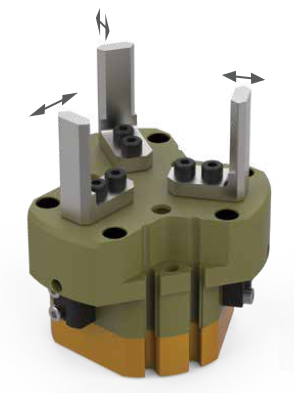
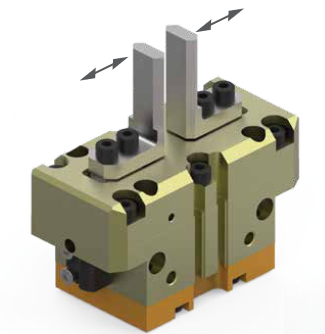
Angular or parallel jaws?
The primary consideration to determine if you need an angular gripper or parallel gripper is how much space is available for the gripper tooling (fingers) to access a part. If you are trying to pick or place a part from a small area you might not have room for the outward rotation of an angular gripper. If you have an odd shaped part, you might not be able to get enough stroke out of a parallel gripper to get the tooling fingers around the part. Angular grippers are ideal if you need to get the tooling out of the way for other processes to occur.
Internal or External Grip?
It is important to consider if you intend to grip a part on the outer diameter (OD) or the inner diameter (ID). External gripping is the most common approach which uses the higher force of the internal piston to apply force to close around the part. Internal gripping allows for unobstructed access to the outside surfaces of a part to allow for secondary processes like painting, polishing or grinding.
Encapsulated or Friction Grip?
The type of grip is defined by the custom machined tooling attached to the jaws of a pneumatic gripper. An encapsulated grip provides the highest level of safety and requires lower holding force. When an encapsulated grip is not possible, you must size the gripper to hold the part using a friction grip. You can add high friction urethane pads or a serrated surface to the fingers to increase friction, which in turn lowers the required gripping force.